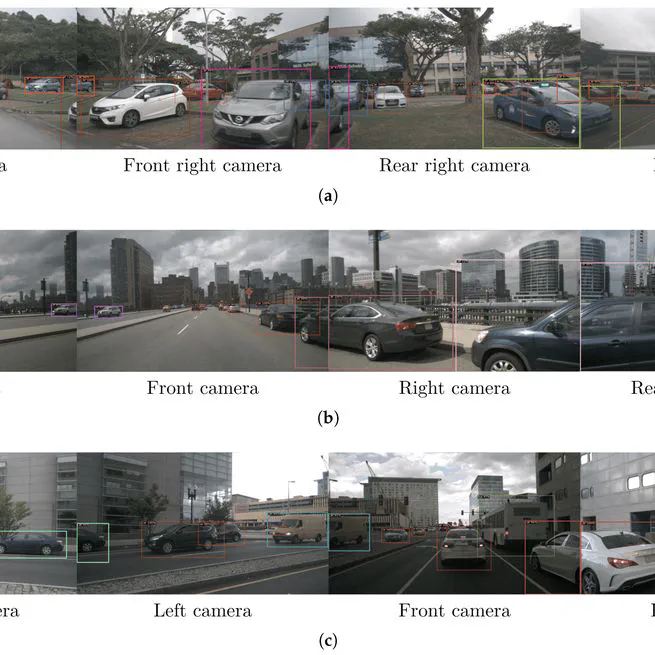
Joint object detection and re-identification for 3D obstacle multi-camera systems
This paper proposes a re-identification branch for Faster R-CNN to address redundant detections in overlapping camera views for autonomous vehicles, improving multi-modal perception pipelines.
Nov 25, 2023

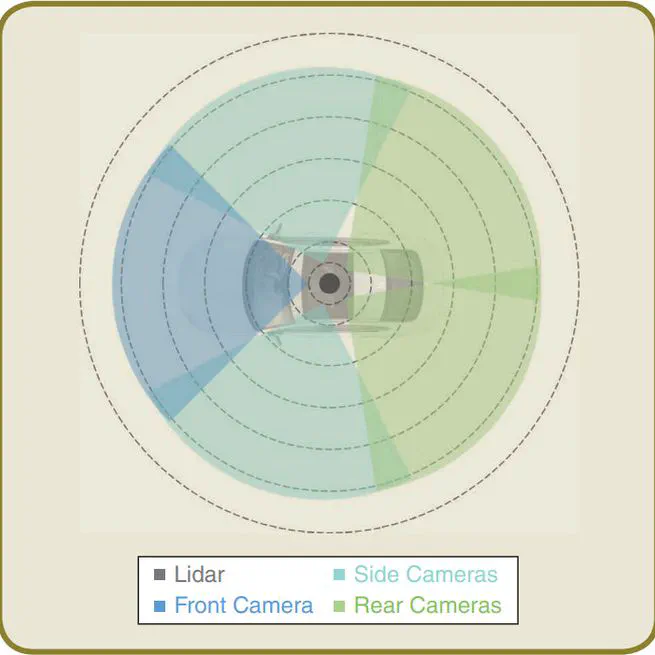
Automatic Extrinsic Calibration Method for LiDAR and Camera Sensor Setups
This paper proposes a method to calibrate extrinsic parameters between LiDARs and cameras (monocular or stereo) to ensure accurate alignment for autonomous perception systems. The approach extracts reference points from custom calibration targets and computes an optimal transformation, showing superior performance in both synthetic and real-world tests.
Mar 11, 2022
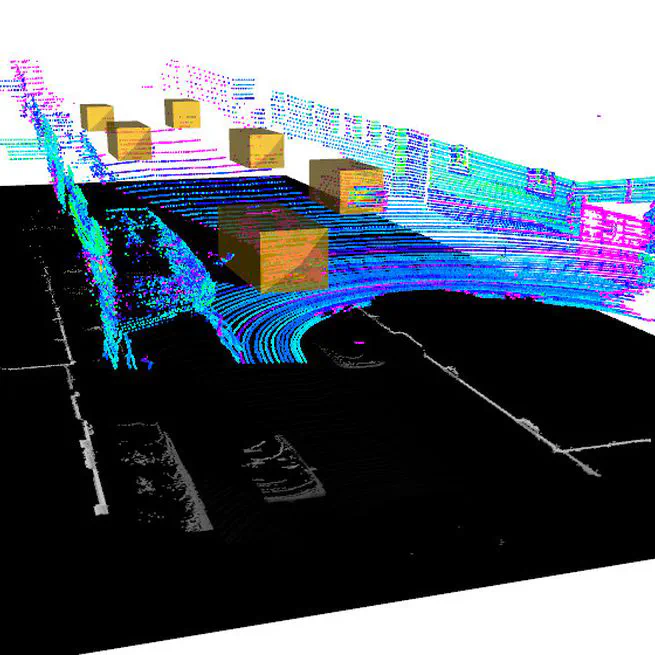
BirdNet+: Two-Stage 3D Object Detection in LiDAR Through a Sparsity-Invariant Bird’s Eye View
This paper introduces an end-to-end 3D object detection network based on Faster R-CNN that uses bird’s eye view (BEV) images from LiDAR data to efficiently generate accurate 3D bounding boxes.
Nov 30, 2021
The tornado project: An automated driving demonstration in peri-urban and rural areas
This article details a two-week demonstration of a fully autonomous Renault Zoe taxi in peri-urban and rural Rambouillet, France, showcasing its ability to navigate complex scenarios like narrow roads and roundabouts.
Jun 14, 2021
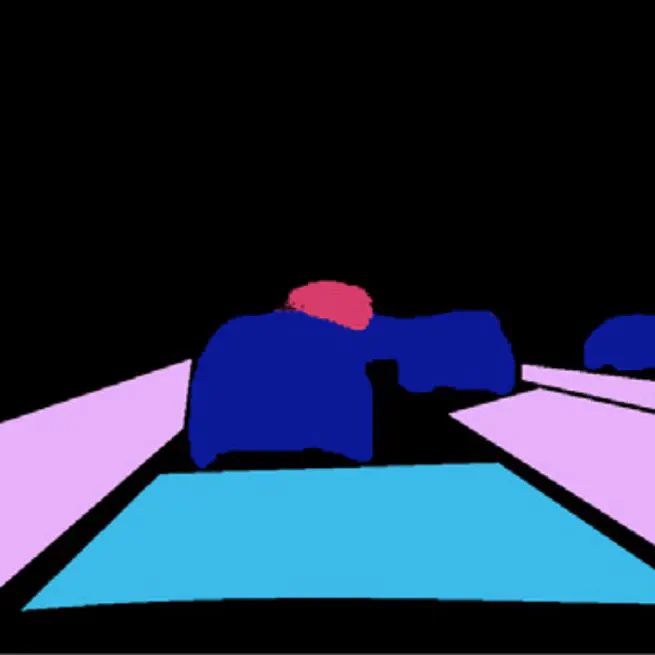
Joint semantic segmentation of road objects and lanes using Convolutional Neural Networks
This paper introduces a multi-task instance segmentation neural network for detecting road lanes and participants, achieving real-time performance with reduced computational demands using an ERFNet-based architecture.
Nov 1, 2020